01
【研究背景】
触觉是生物从外界获取信息的重要途径,也是智能可穿戴设备、医疗软体机器人、仿生假肢等新兴设备/系统不可或缺的功能。触觉传感器的传感能力可与天然人体皮肤或动物感觉器官相媲美,甚至更胜一筹,近年来引起了学术界和工业界的广泛关注。近年来触觉传感在结构设计和传感机制等方面取得了很大的进展。然而,绝大多数已开发的触觉传感器只能检测法向力,而通常无法分辨剪切力,甚至无法区分力的方向。由于自然触觉不仅涉及力的强度检测,还包括对其他复杂机械参数的感知,如力方向、接触位置、表面纹理等。因此触觉传感器要完全实现模仿触觉功能,尚有一系列难题需要克服。
02
【文章简介】
近日,四川大学机械工程学院的王竹卿教授和吴晓东研究员团队,受蜘蛛的狭缝器官和刚毛的启发,通过合理的材料选择、结构设计和系统集成,提出并展示了一种新型的高灵敏度的触觉传感器。所制备的触觉传感器具有高灵敏度(25.76 N-1)、低检测限(5.4 mN)、理想的稳定性(超过2500个循环)以及能解析机械强度和方向特征的良好能力。该研究将制备的触觉传感器成功应用于表面纹理识别和仿生路径探索,并在可穿戴设备、软体医疗机器人和具有高操作灵活性的仿生假肢方面表现出良好的应用前景。研究相关成果以 “Bioinspired Tactile Sensation based on Synergistic Microcrack-Bristle Structure Design towards High Mechanical Sensitivity and Direction-Resolving Capability” 为题,发表在国际著名期刊《Research》上(《Science》合作期刊,影响因子:11.036,中科院1区Top期刊),论文第一作者为四川大学机械工程学院2022级研究生张义群同学。
03
【研究内容】
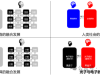
图1. 仿生触觉传感器的设计理念和工作原理。触觉传感器由具有信号放大作用的刚毛结构和具有高灵敏特性的微裂纹结构组成,刚毛结构周围环绕着分布在十字形结构上的四个高灵敏度微裂纹通道。传感器的测量电极位于每个通道的末端。四个通道共享位于传感器中间的参考电极。当刚毛顶端受到不同方向的机械刺激时,四个通道上的微裂纹结构会不同程度的靠近或分离,从而引起不同的电阻变化。因此,基于协同微裂纹-刷毛结构设计和十字形器件构型,可以通过测量电极和参比电极之间每个通道电阻的变化来实现机械力的方向和强度的检测。 图2. 使用所提出的触觉传感器解析施加力的方向。通过合理的传感材料选择和传感器结构设计,所制备的触觉传感器具有高灵敏度和对机械刺激的强度和方向特征的良好稳定的分辨能力。 图3. 基于协同微裂纹-刚毛结构的触觉传感器的纹理识别应用。所提出的基于协同微裂纹-刚毛结构的触觉传感器具有高机械灵敏度。通过分析刚毛从物体表面扫描后所得到的触觉传感器的响应信号 (如频率、强度等),可以对物体的表面纹理进行评价,从而实现对不同纹理的检测和区分。此外,结合机器学习来解析和分类从触觉传感器获得的信号,实现了较高的纹理识别准确率(96.2%),验证了触觉传感器和机器学习框架的良好可靠性,表现出在构建智能机器人电子皮肤方面的广阔应用前景。
04
【结论和展望】
综上所述,本工作提出了一种新型的仿生触觉传感器,通过协同微裂纹-刚毛结构设计和十字形构型工程来识别和检测机械刺激的强度和方向。该触觉传感器具有高灵敏度、低检测限、良好的稳定性以及良好的机械强度和方向特征的分辨能力。该触觉传感器成功地应用在了表面纹理识别和仿生路径探索等场景。本工作所提出的触觉策略和技术为柔性机器人和仿生义肢的构建提供了一种新的方法,在构建具有高操作灵活性的各种机器人方面具有巨大的潜在应用价值。 文献链接: https://spj.science.org/doi/10.34133/research.0172
|