01
研究背景
由于其卓越的成像分辨率和范围,光探测和测距(LiDAR)正迅速成为智能自动化系统(包括自动驾驶汽车和机器人)不可或缺的光学感知技术。下一代激光雷达系统的开发迫切需要一种在空间扫描激光束的非机械光束控制系统。当前已经开发了各种光束控制技术,包括光学相控阵、空间光调制、焦平面开关阵列、色散频率梳和光谱-时间调制。然而,这些系统大多是笨重、脆弱和昂贵的。
02
研究问题
本研究报告了一种集成在芯片上声光控制技术,该技术仅使用一个千兆赫声学传感器将光束控制到自由空间中,然后利用布里渊散射的物理学原理以不同角度控制的光束以独特的频移进行标记。该技术使用单个相干接收器在频域中解析物体的角位置,并实现频率-角度解析激光雷达。本研究演示了一种简单的设备结构、用于波束控制的控制系统和频域检测方案。该系统实现了调频连续波测距,视场角为18°,角分辨率为0.12°,测距距离可达115米。该演示可扩展至阵列,从而实现具有宽二维视场的小型、低成本频率角分辨激光雷达成像系统。这一技术的发展标志着激光雷达在自动化、导航和机器人领域的广泛应用迈出了重要一步。
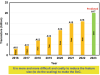
▲图1|基于AOBS和芯片级器件的远红外激光雷达原理
要点:1.如果声波频率足够高,声波数K =Ω/v将大到足以将光波导模式散射到光锥中,从而将光束引导到自由空间中。图1a说明了这种原理,这是本研究的声光光束控制(AOBS)的基础。图1b中的色散图描述了AOBS的相位匹配条件。2.本研究用绝缘体上铌酸锂(LNOI)衬底制作了AOBS器件。图1c展示了在LNOI芯片上制造的十个AOBS器件的阵列。每个AOBS装置都有一个非常简单的结构,只有两个组件。在一端利用铌酸锂(LN)产生强压电性,然后叉指换能器(IDT)(图1d)被图案化并用于激发声波。本研究选择x切割、y传播配置来产生声波,这是传播损耗和机电耦合效率的最佳组合。在另一端,光栅耦合器在氢基倍半硅氧烷中形成图案。光栅将来自激光器的光耦合到由LN层形成的平面波导的横向电场(TE)模式。IDT和光栅耦合器之间的间距w = 100微米宽,l = 2毫米长,是AOBS的标称孔径。声波由IDT产生并传播以填充该孔径,从而散射反向传播的光。从TE模式在1.55微米光波长(图1b)的色散关系(图1e),可以从等式(1)计算所需的声波数。
▲图2| AOBS的表征和多波束生成
要点:1.AOBS装置的光束控制结果如图2所示。光纤耦合的近红外二极管激光器用作光源,IR照相机被放置在透镜的焦平面处,以在动量空间(k空间)中对受控波束进行成像。图2a显示了由照相机捕获的叠加图像,显示了当光束从22°扫描到40°时的66个斑点。光斑强度的变化归因于IDT带宽内不均匀的机电转换效率。2.图2b展示了一个光斑的详细轮廓,其沿着kx轴具有0.11°的角发散度(半高宽),沿着ky轴具有1.6°的角发散度。椭圆光斑形状受到矩形孔径的衍射限制。穿过FOV的光束的平均kx轴角发散度是0.12°,因此沿着kx轴的可分辨斑点的数量是N = 150,这低于理论值。3.图2c展示了从AOBS孔径散射的光的真实空间图像。散射光的强度从IDT的前沿(x = 0)向光栅耦合器衰减。因为TE模式的光传播损耗预计较低,所以用模型拟合图2c中的结果揭示了声波遭受高损耗,传播长度(1/e)约为0.6±0.1mm,这减小了有效AOBS孔径长度。相比之下,类似频率的声波在体铌酸锂中的传播长度为厘米级。4.等式(1)描述的AOBS频率-角度关系θ(ω)被测量并绘制在图2d中。该测量提供了在远激光雷达中使用AOBS所需的校准。此外,多个音调的声波可以在AOBS孔径中共同传播,从而同时产生多个波束,如图2e–h所示。每个波束的相位和幅度由相应的射频驱动独立控制。
▲图3| 2D远激光雷达成像
要点:1.本研究演示了2D激光雷达成像。图3a显示了远激光雷达系统的示意图。在发射器中,AOBS装置将激光束以θ(ω)角射向远场中的物体。如果执行FMCW测距功能,则使用电光相位调制器(EOM)来产生啁啾光源(chirped light source)。如果没有FMCW,受控波束的频率会偏移到ω0+Ω处的反斯托克斯频率。为了解决这种频率偏移,本研究使用相干接收机方案。接收器抽取激光源的1%作为本地振荡器(LO)。来自物体的反射光由放置在焦平面前的透镜和单模光纤收集,以收集FOV内的反射光。光纤的另一端连接到50/50光纤耦合器,接收到的信号在该耦合器中与LO相结合。使用平衡光电检测器(BPD)检测频率为Ω的拍频信号,并对其进行数字化和分析。2.图3b示出了当AOBS在FOV上扫描波束时,在接收机上测量的各种拍频信号。可以将频率Ω转换成角度θ’并重建物体的图像。在图3c中,本研究展示了一个哈士奇狗标志的剪影图像,该剪影由尺寸为60 × 50 mm的逆反射膜制成,放置在距离激光雷达1.8米的位置。因为AOBS在水平维度上扫描光束,所以使用检流计镜在垂直方向上扫描。每个像素的位置从相应的拍频中解析得到,亮度从信号强度中解析得到。3.图3d、e展示分别以1.6575 GHz和1.7125 GHz为中心的两个像素的信号。本研究还测量了AOBS的点对点交换速度。测得的上升时间为1.5 μs,这可能受到电子系统的限制,因为它比有效孔径中约0.19 μs的声波传播时间长得多。
▲图4| FMCW和FAR LiDAR的3D成像
要点:1.图4a展示了当使用小的频率啁啾偏移fE = 10 MHz时,发射器处的啁啾光源和接收器处的反射光信号的时间-频率谱图。线性调频速率为g = 1 MHzμs-1,积分时间为2 μs,请注意,这里的反射信号具有声频Ω/2π的额外频率偏移,并且由于飞行时间2d/c而存在延迟,因此参考信号和信号之间的拍频在Ω/2π±fB之间交替变化(图4b,上图)。然而,由于涉及两个边带,并且它们的频率以相反的方向线性调频,因此接收器处的拍频信号始终具有两个Ω/2π±fB的频率。由于存在未受抑制的载波,频率Ω/2π也十分明显。这在图4b(下图)中示出。当测量远处的目标时,fE增加到1 GHz,而g保持不变。2.图4c显示了当使用三种不同的声频Ω/2π来控制不同方向的波束时的差拍信号的频谱,其中波束被放置在最长3米的不同距离处的反射器反射。该频谱包含用于远成像的声频Ω/2π的频率分量,以及具有MHz拍频fB的Ω/2π+fB(ω/2πfB未显示)的频率分量,拍频fB随着反射器的距离增加而增加。通过解析所有这些频率分量,可以在一次扫描中同时获得FAR和FMCW测量以及完整的3D激光雷达图像。3.本研究在图4d中展示了这一点,将一对1/2–20不锈钢螺栓和螺母(插图,图4d)放置在距离激光雷达0.5米处。图4d中所获取的点云图像清楚地示出了在深度上相隔8 cm的两个物体的形状。图4e显示了两点的原始数据,螺栓上的A点和螺母上的B点。图4f示出了图4e中FMCW拍频信号的细节。
03
结语
本研究演示了使用AOBS设备实现的FAR和FMCW激光雷达方案的3D成像。AOBS独特地转换了转向光的角度和频率,实现了频域成像。单AOBS原型具有1.5 μs的电子限制开关速度,对应于当高速探测器用于飞行时间或FMCW探测时每秒0.67百万像素的成像速率。如果使用16个通道进行成像,一个AOBS设备提供超过每秒1000万像素的成像速率。该系统性能还有很大的提升空间。2D扫描可以用放置在柱面透镜38的焦平面上的AOBS器件阵列来实现,每个器件独立扫描以覆盖水平维度。在接收器中,使用相干接收器或光纤束的阵列来收集FOV内的光可以显著提高收集效率。先进的IDT设计,例如单相单向换能器(SPUDTs),可以增加声学带宽,从而增加FOV和波束控制效率。通过使用更高质量的材料平台,可以减少声学损失,从而可以实现更长的孔径。此外,FMCW所需的电光调制器也可以集成在LN平台上,形成一个完整的单片发射机模块。有了这些改进和创新,多元件、芯片级AOBS系统可以提供覆盖大FOV的高效2D波束控制。简单的设备结构、简单的光束控制、频域分辨能力、微型形状因数和低成本的组合优势使得演示的基于AOBS的激光雷达成为一种有前途的技术。
原文链接: https://www.nature.com/articles/s41586-023-06201-6 https://doi.org/10.1038/s41586-023-06201-6
|