|
模仿人类机械感觉的三维电子皮肤 人类能够完成灵巧操作、环境探索和触觉任务,主要依赖皮肤对多模态机械刺激的感知能力和大脑的信号处理能力。这些感知源自皮肤中的机械感受器,将施加在皮肤上的力转换为电信号,传递到中枢神经系统。梅克尔细胞和Ruffini末梢是两种关键的机械感受器,它们分布在皮肤的不同层次,分别对外力和应变敏感。 仿生皮肤通过模仿这些感受器的分布,可以开发出解耦传感的人工电子皮肤。然而,结构复杂的三维电子装置和传感元件的分布控制仍是巨大挑战。尽管已有许多电子皮肤技术,如表皮电子系统、神经形态皮肤电子系统和多参数传感电子皮肤等,但它们尚未能完美模仿机械感受器的三维分布,并且无法实现与人体皮肤相近的高精度力和应变解耦测量。 在此,清华大学张一慧教授课题组报告了一种三维(3D)结构的电子皮肤(称为 3DAE-Skin),其力和应变传感元件的三维布局模仿了人体皮肤中的默克尔细胞和 Ruffini 末梢。这种 3DAE 皮肤具有出色的法向力、剪切力和应变解耦传感性能,可用于开发触觉系统,通过触摸同时测量物体的模量/曲率。作者还演示了包括对不同形状和新鲜度的水果、面包和蛋糕进行快速模量测量。相关成果以“A three-dimensionally architected electronic skin mimicking human mechanosensation”为题发表在《Science》上,第一作者为Zhi Liu,Xiaonan Hu和Renheng Bo为共同一作。
3D电子皮肤的仿生设计和制造 图1A展示了3D电子皮肤的生物启发设计理念。它模仿皮肤的三层结构,包括“表皮层”、“真皮层”和“皮下层”,这些层的厚度和弹性模量与真实皮肤接近。传感元件和相关电路主要嵌入真皮层,产生的信号通过数据采集和深度学习模块进行处理,类似于中枢神经系统的功能。图1B-C展示了3D电子皮肤的几何布局及其代表性功能单元的结构。3D电子皮肤由功能、基底和封装三部分组成。功能部分包括一个5x5的三维结构单元阵列,每个单元采用九层结构,包括两个力传感层、两个应变传感层和五个聚酰亚胺(PI)层。图1D-H展示了制作好的3D电子皮肤的光学图像,以及功能单元、力/应变传感器和垂直互连接入孔的放大视图。为了提高视觉质量,封装仅在笼状中间结构的内部区域进行。 单轴拉伸测试表明,封装后的3D电子皮肤非常柔软,弹性模量约为194 kPa,响应范围与人体皮肤相似。此外,由于采用了柔软材料的异质封装策略,3D电子皮肤具有良好的柔韧性和伸展性,可以可靠地集成到假手的指尖上(图1J-L)。
图 1. 3D电子皮肤 的仿生设计和制造 3D电子皮肤的解耦传感机制和性能 3D电子皮肤依靠三维微架构将外部法向力/剪切力转化为八臂笼状介质结构上压阻传感器的应变变化,然后转化为可定量记录的电阻变化(图 2A )。图 2B 显示了传感器阵列受到扁平压头挤压时 3D电子皮肤的传感性能。对压力加载的灵敏度约为 5 × 10-5 kPa-1,线性范围约为 80 kPa。虽然封装的 3D电子皮肤相当柔软,但响应速度仍然很快,在快速移除压力负荷时的响应时间约为 0.25 秒。在 ~3000 次加载/卸载压力(60 kPa)过程中,压力传感稳定可靠(图 2C)。图 2 D - E 展示了 3D电子皮肤在沿不同方向的剪切负载下的传感性能。实验中考虑了六个不同的加载角度(θ = 0°、45°、112.5°、180°、225°和 292.5°),每个加载角度施加了五个剪切力大小。根据公式可预测的剪切力和加载角度与所有不同加载条件下的规定值非常吻合。图 2F表明,在对 3D电子皮肤施加 10,000 次单轴拉伸期间,传感器的灵敏度约为 0.02。 由于力传感元件非常靠近表皮表面,而八臂笼状中层结构的刚度远高于其他区域,因此应变传感元件中的最大主应变远小于力传感元件中的最大主应变(图 2G)。在这种情况下,应变传感元件中最大主应变的幅度(~0.012%)也远小于 15%单轴拉伸下应变传感元件中的应变值(~0.14%)。在单轴拉伸条件下,由于相对坚硬的笼状中层结构的应变隔离,力传感元件中的最大主应变远小于应变传感元件中的最大主应变(图 2H)。图 2I提供了在纯压力加载、压力和剪切力耦合加载、纯单轴拉伸、单轴拉伸和压力耦合加载以及拉伸、压力和剪切力耦合加载的顺序过程中的实验结果。法向力/剪切力和应变的响应定量证明了 3D电子皮肤 的解耦传感能力。
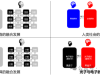
图 2. 3D电子皮肤的解耦传感机制和性能 法向/剪切力和应变的时空映射 3D电子皮肤集成了数据采集电路和信号处理模块,形成一个完整的触觉系统(图3A)。数据采集电路能够独立读取每个压阻传感器的数据,无串扰(图3B)。信号处理模块通过计算公式和深度学习神经网络(DNN)模型,能够可视化并定量解码法向力、剪切力和应变的时空分布。图3C-G展示了3D电子皮肤接触字母T、H和U的3D打印浮雕结构时的反应。图3D显示了中心区域9个单元的压力和剪切力随时间变化,以及相邻12个单元的应变响应。图3E-G展示了三个典型时刻的时空分布图。非均匀压缩时,3D电子皮肤捕捉到了T型浮雕的压力分布(图3E)。施加法向力和剪切力时,一侧产生拉伸应变(图3F)。图3G展示了一种复杂的加载情况,显示了3D电子皮肤在测量耦合力方面的能力和在扭矩感应方面的潜力。 通过DNN模型,该触觉系统实现了超分辨率传感,在施加的法向力位置和大小与240个压阻传感器的电阻变化之间建立了隐式映射(图3H-J)。DNN模型显著提高了加载位置预测的精度,均方根误差明显减小,法向力感应分辨率接近人手水平。在法向力和剪切力联合加载时,DNN模型同样提高了预测精度。
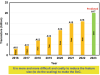
图 3. 使用基于 3D电子皮肤 的触觉系统绘制力和应变的时空图 同时定量测量弹性模量和主曲率分量 测量物体的弹性模量和主曲率对假手应用非常关键,尤其在物体形状未知时。人类通过触摸感受到的力分布和皮肤变形来判断物体的软硬度和形状。类似地,3D电子皮肤触觉系统通过不同的应变和力分布区分物体的软硬度和局部曲率(图4A)。 作者开发的DNN模型将弹性模量(E)和主曲率(κ1和κ2)与240个压阻传感器的电阻变化相关联,预测未知物体的弹性模量。数据集包含51种表面形状和15种模量的样品,共30,600个样本,分为训练、验证和测试集。图4B-D显示了对不同形状物体弹性模量的准确预测。3D电子皮肤的测量值与其自身模量-相当,能在局部曲率达到约0.1 mm-1时提供准确预测。 一些食品的成熟度或新鲜度难以通过视觉方法区分,3D电子皮肤触觉系统提供了快速解决方案。作者测量了四种水果(猕猴桃、桃子、李子和西梅)在不同成熟状态下的弹性模量(图4E)。例如,猕猴桃在成熟过程中模量从3.2 MPa降至0.2 MPa(图4F)。相比之下,发酵面包或蛋糕在暴露空气中会变硬。图4G显示,纸杯蛋糕在一天内模量从0.45 MPa增至2.3 MPa,两天后增至3.0 MPa。牛角面包的硬化更明显,从0.3 MPa增至3.3 MPa。
图 4. 弹性模量和主曲率分量的同步定量测量 小结 通过生物启发的三维架构设计、异质封装策略和微加工技术,开发出模仿人体皮肤的3D电子皮肤。该系统结合深度学习算法,实现了法向力、剪切力和拉伸应变的高分辨率感测,并能通过触摸同时测量物体的模量和曲率。实验表明,其在食品评估、人机交互、仿人机器人、智能假肢和自动检测等领域具有重要应用潜力,尽管目前的设计主要模仿指尖感知,但其制造方法可扩展用于其他假肢或机器人系统。 文献链接Zhi Liu et al. ,A three-dimensionally architected electronic skin mimicking human mechanosensation.Science384,987-994(2024).DOI:10.1126/science.adk5556https://www.science.org/doi/10.1126/science.adk5556 |