|
在人类的触觉探索和灵巧的物体操作中,快速而有效地处理动态触觉信号至关重要。传统的电子皮肤在与物体互动时生成触觉信号的帧,但它们通常无法有效地编码时间信息和快速提取特征。
2024年5月9日,瑞典乌普萨拉大学的Zhi-Bin Zhang和Ayça Özçelikkale等人在世界知名期刊Science上发表了一篇名为:Spike timing–based coding in neuromimetic tactile system enables dynamic object classification的论文。该论文第一作者是瑞典乌普萨拉大学的Libo Chen助理教授。该论文报告了一种新型的神经形态触觉系统,利用了生物学中稀疏脉冲的时间编码机制,可以以毫秒级(1.2毫秒)的时间分辨率编码高度动态的触觉信息,从而实现了快速的物体分类。这种系统的设计使得它能够在处理触觉信号时具有与生物神经系统相似的效率和精确性,为神经假肢和神经机器人技术的发展提供了重要的基础。
同期,圣安娜高等学校生物机器人学研究所和人工智能与机器人学部的Silvestro Micera在Science上发表了一篇名为:Toward more naturalistic tactile sensors的新闻报道,称Zhi-Bin Zhang等人开发的高度动态的仿生触觉系统代表了未来机器人和假肢系统的重要组成部分。
硬件由64个触觉传感器组成,分布在电子皮肤上,将机械刺激转化为跨软件实现的尖峰神经元网络上的受体电位。传感器包括人工受体,模仿特定的人类机械感受器的功能,并设计了一个电路,通过使用“漏电-积分-放电”模型来模拟触觉感觉神经元的功能。然后,触觉脉冲神经网络(t-SNN)使用这些信号来从触摸的表面实现动态和快速的特征提取,包括曲率和硬度。
这种高度动态的信息具有非常快的时间分辨率,支持在抓取时对不同物体进行有效分类。值得注意的是,该系统对不确定性(包括电子皮肤被不同的人类使用)和损坏(例如电子皮肤中一些触觉传感器的丢失)具有鲁棒性。 神经形态触觉系统的设计和编码原则 该神经形态触觉系统使用人工感知器和尖峰神经元网络,模仿人类的触觉系统。当系统与物体互动时,人工感知器将机械刺激转换成电位信号,并将其编码成尖峰列车,以表示触觉信息。然后,尖峰神经元网络对这些尖峰列车进行处理,用于识别物体和提取特征。这种设计能够以高效、动态的方式处理触觉信息,有助于神经假肢和机器人技术的发展。
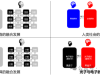
图1. 具有脉冲时序编码策略的神经形态触觉系统。 将关于触摸的动态触觉信息编码为尖峰时序 人工感知神经元在接触事件中能够有效地编码触觉信息,并且在事件驱动下消耗的能量很少。他们还触摸了不同形状和硬度的表面,并发现这些表面的接触会导致尖峰时序中出现不同的模式。最重要的是,第一个尖峰的模式能够很好地表示触摸过程中的动态信息,例如曲率和硬度。
图2. 使用指尖对触摸表面进行触觉信息编码。 利用尖峰时序实现触摸动态特征提取 他们还测试了系统在触摸不同表面时的准确性,并发现系统能够快速而准确地提取出触觉特征,并且能够有效地对表面进行分类。此外,他们还开发了一个仿生感知运动系统,在小鼠的运动神经上进行了测试,结果显示该系统对表面硬度的感知能力良好,有望在神经假肢设备的开发中发挥作用。
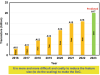
图3. 使用指尖通过触摸进行动态特征提取和物体分类。 通过实验对22种不同形状、大小和硬度的日常物品进行了抓取,并发现系统能够在抓取的初始阶段迅速而准确地识别物体。系统对于对象的分类准确率随时间迅速增加,与第一个尖峰的计数密切相关。即使在实验中引入了不同主体之间的行为差异和数据样本的巨大变化,系统的性能依然稳健可靠。
图4. 使用受试者手部抓握进行动态特征提取和物体分类。 总之,Zhi-Bin Zhang等人的研究为发展仿生触觉系统奠定了基础,这些系统可以更加真实地模拟人类触觉。我们的想法是利用人工受体来模仿自然皮肤中的各种机械感受器,从而增强信息处理能力和整体效率。在实际使用中,我们可以将这些受体集成到美观的手套中,或者直接嵌入到假肢中,以确保既有良好的触觉反馈,又不影响外观和功能。
原文链接: https://doi.org/10.1126/science.adf3708 https://doi.org/10.1126/science.adp2623
|